Autoencoder with Multidimensional Convolutional Layers (1D-6D)
Code available on GitHub
This project explores how convolutional autoencoders can be implemented with layers of different dimensionalities, from 1D to 6D. While we always start with the same 2D image data, we process it through neural networks whose internal layers operate on tensors of increasing dimensionality, 1D-6D.
This is an exploration with Cursor + Claude 3.7
Autoencoder Overview
An autoencoder is a type of neural network that consists of two parts:
- An encoder (a convolutional neural network that compresses the input)
- A decoder (a transposed convolutional neural network that reconstructs the input)
Each higher-dimensional layer creates more connections between neurons, allowing for more complex pattern recognition across multiple dimensions simultaneously.
We start with a standard 2D grayscale image and process it using autoencoders with different layer dimensionalities:
- 1D Autoencoder: Flattens the 2D image into a 1D sequence for processing with 1D layers
- 2D Autoencoder: Processes the image directly with 2D layers
- 3D Autoencoder: Expands the image into a 3D volume for processing with 3D layers
- 4D Autoencoder: Creates a 4D representation for processing with 4D layers
- 5D Autoencoder: Creates a 5D representation for processing with 5D layers
- 6D Autoencoder: Creates a 6D representation for processing with 6D layers
Each implementation maintains the same architectural pattern:
- Encoder: 3 convolutional layers with stride 2 (1→8→4→4 channels)
- Decoder: 3 transposed convolutional layers with stride 2 (4→4→8→1 channels)
Hierarchical Convolution Approach
For dimensions higher than 3D, we implement a hierarchical convolution approach:
- 3D and below: Use PyTorch's native convolution and transposed convolution operations
- 4D: Implement 4D convolutions using multiple 3D convolutions
- 5D: Implement 5D convolutions using multiple 4D convolutions
- 6D: Implement 6D convolutions using multiple 5D convolutions
This hierarchical approach demonstrates how convolution operations can be extended to arbitrarily high dimensions. Also note the actual dimensions of the encoders is 2 higher due to how convolutional neural networks are implemented as it's comprised of spatial dimensions and I/O channel dimensions.
Reconstruction
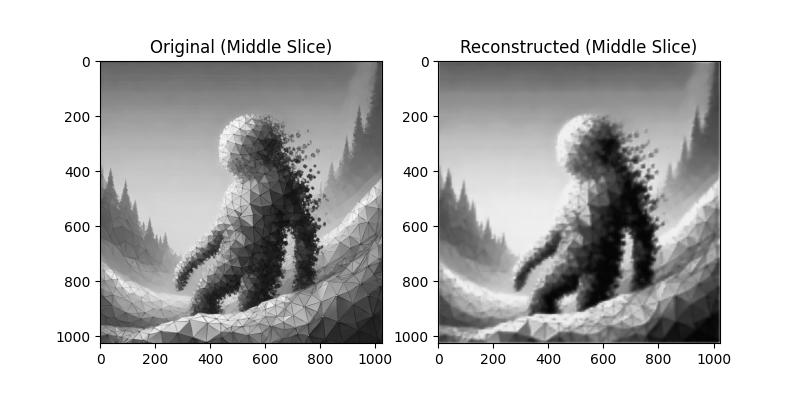
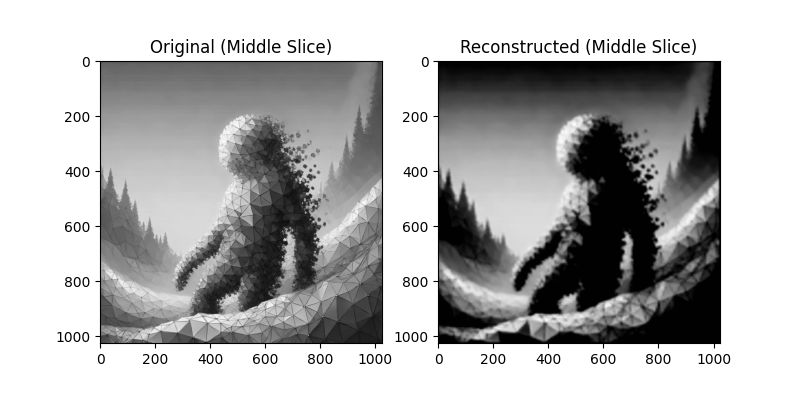
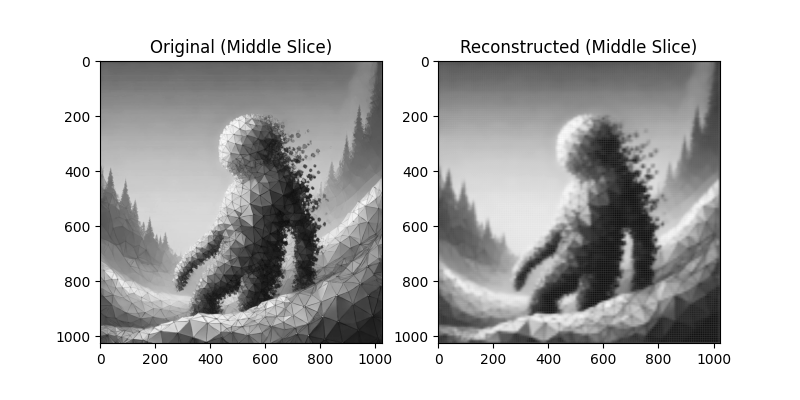
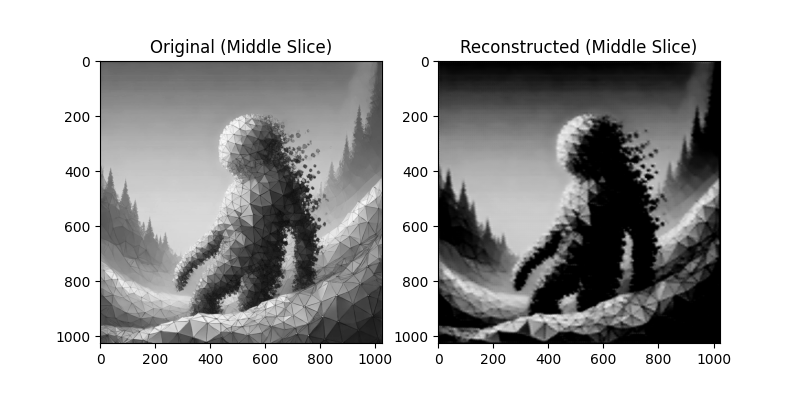
Each model attempts to reconstruct the original image. Below are the reconstruction results:
1D Layer
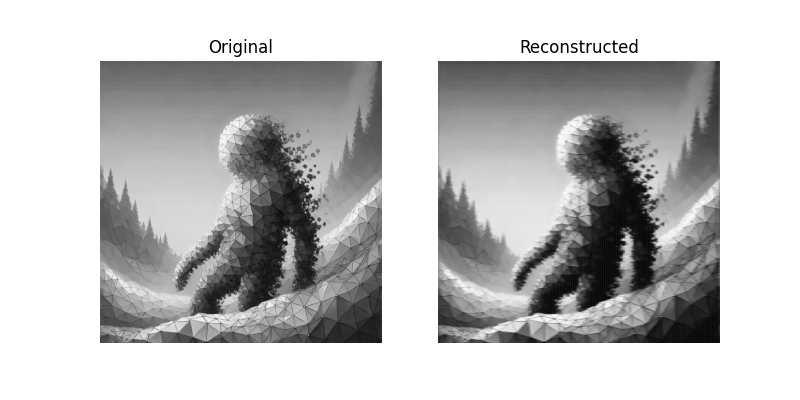
2D Layer
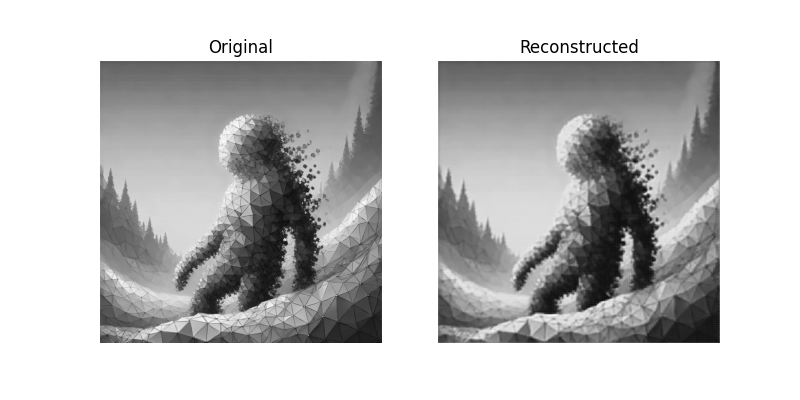
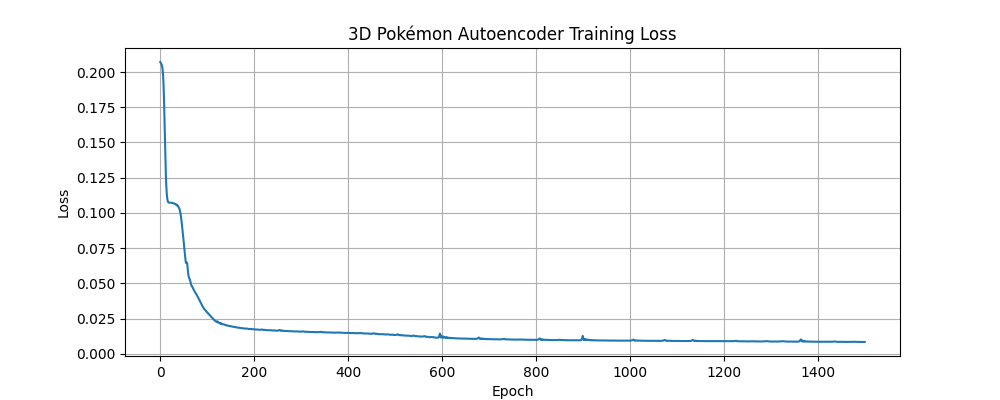
3D Layer
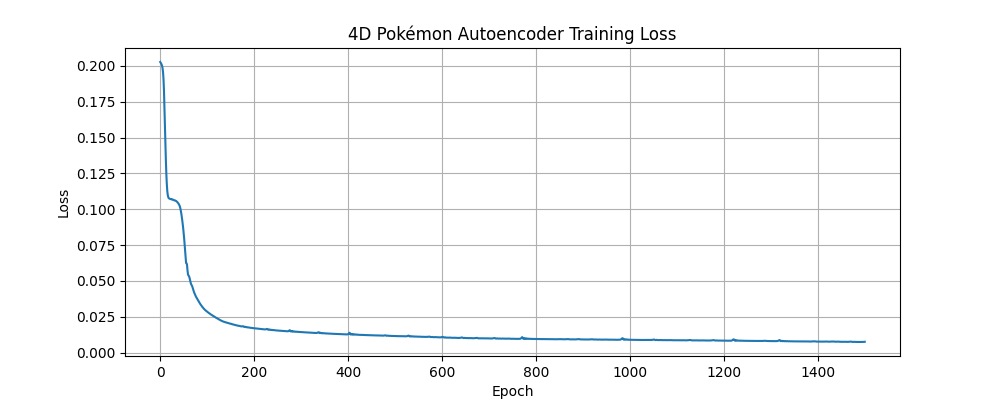
4D Layer
5D Layer
6D Layer
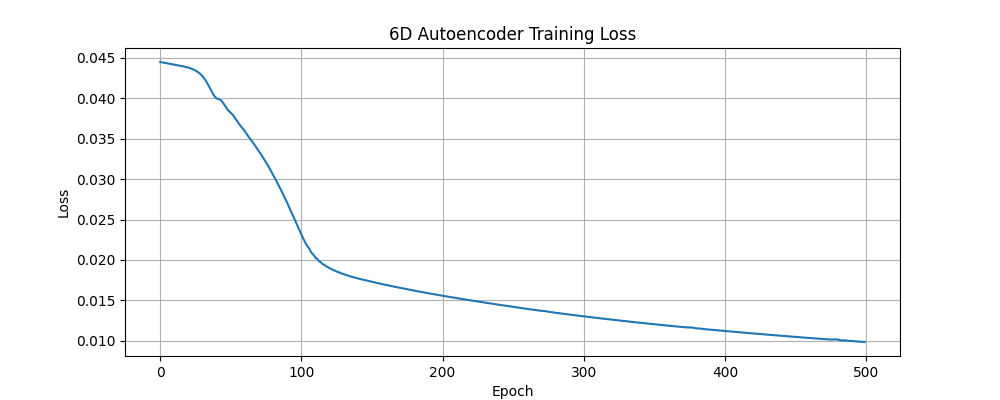
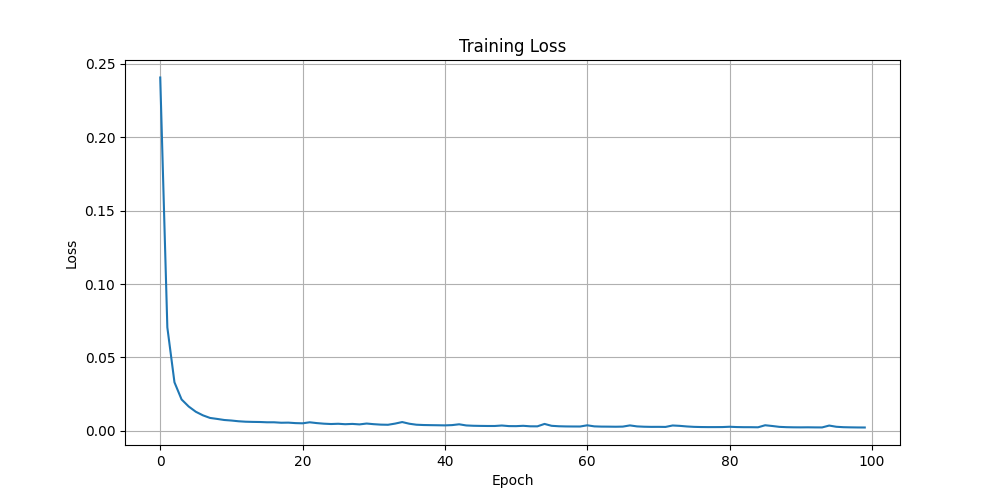
Training Loss
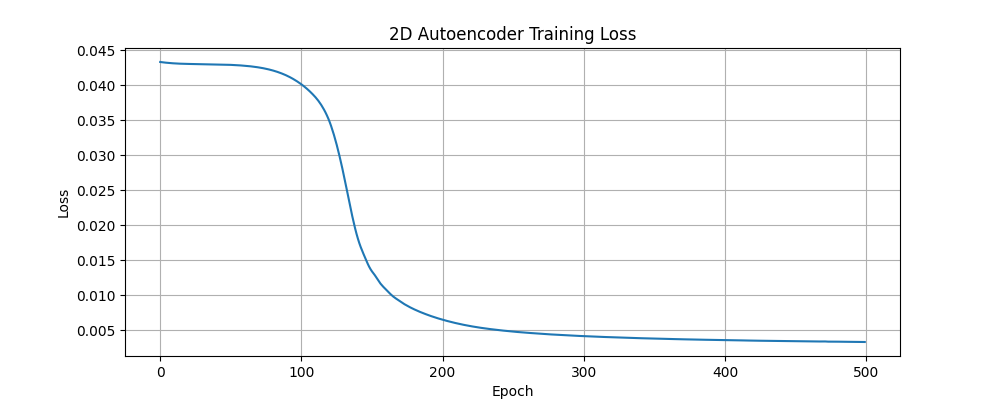
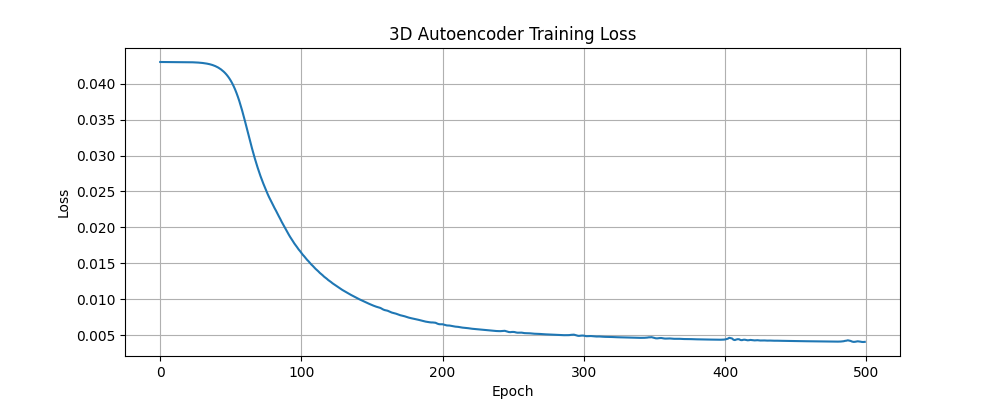
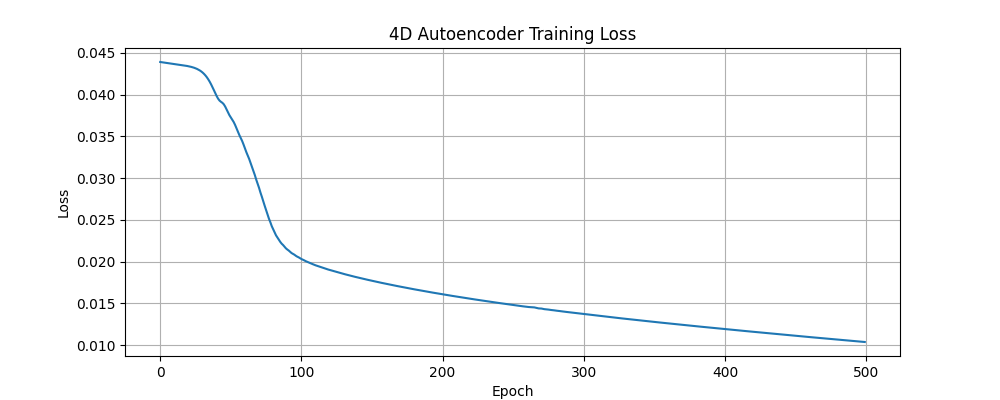
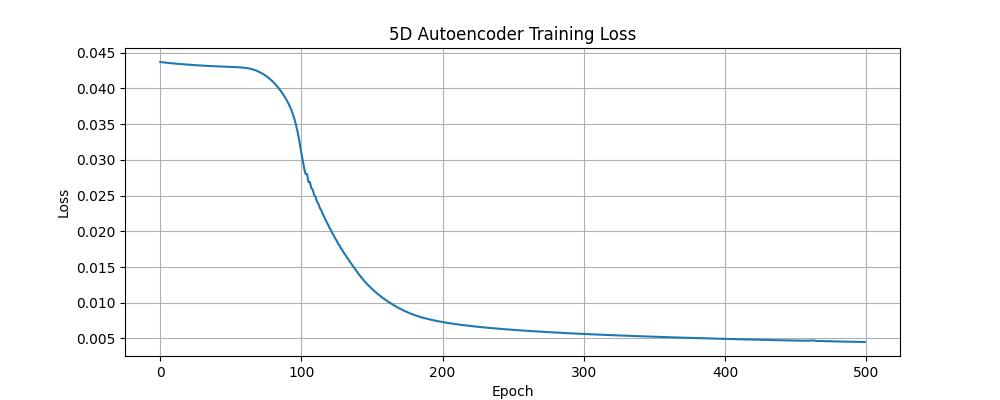
Each model was trained for 500 epochs on the same input image. Below is the combined training loss curve for all dimensions:
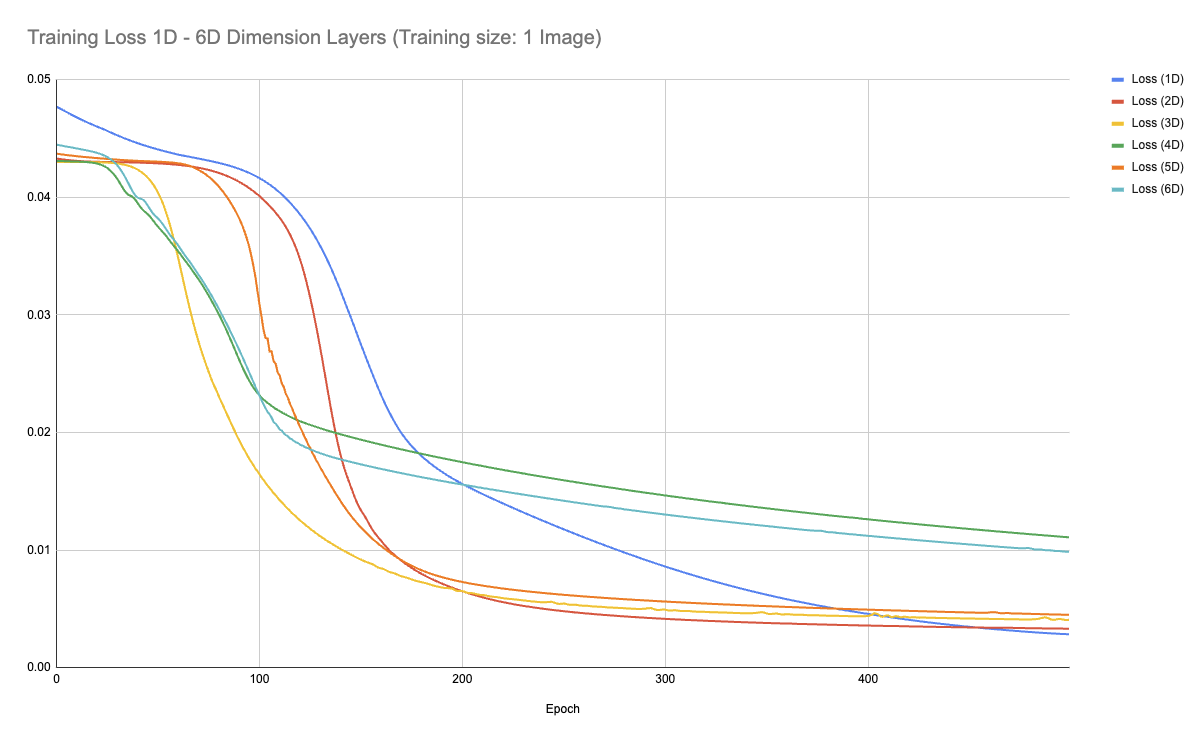
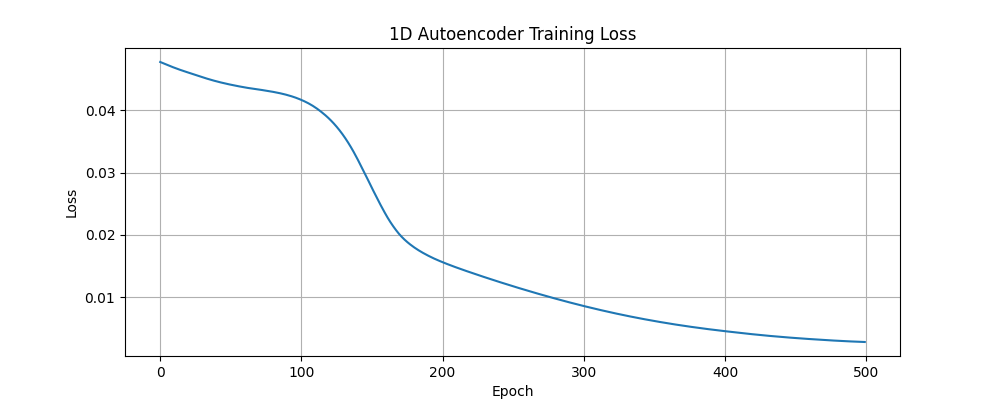
Below are the individual training loss curves:
1D Layer
2D Layer
3D Layer
4D Layer
5D Layer
6D Layer
Note: Training times increased considerably as the dimensionality increased.
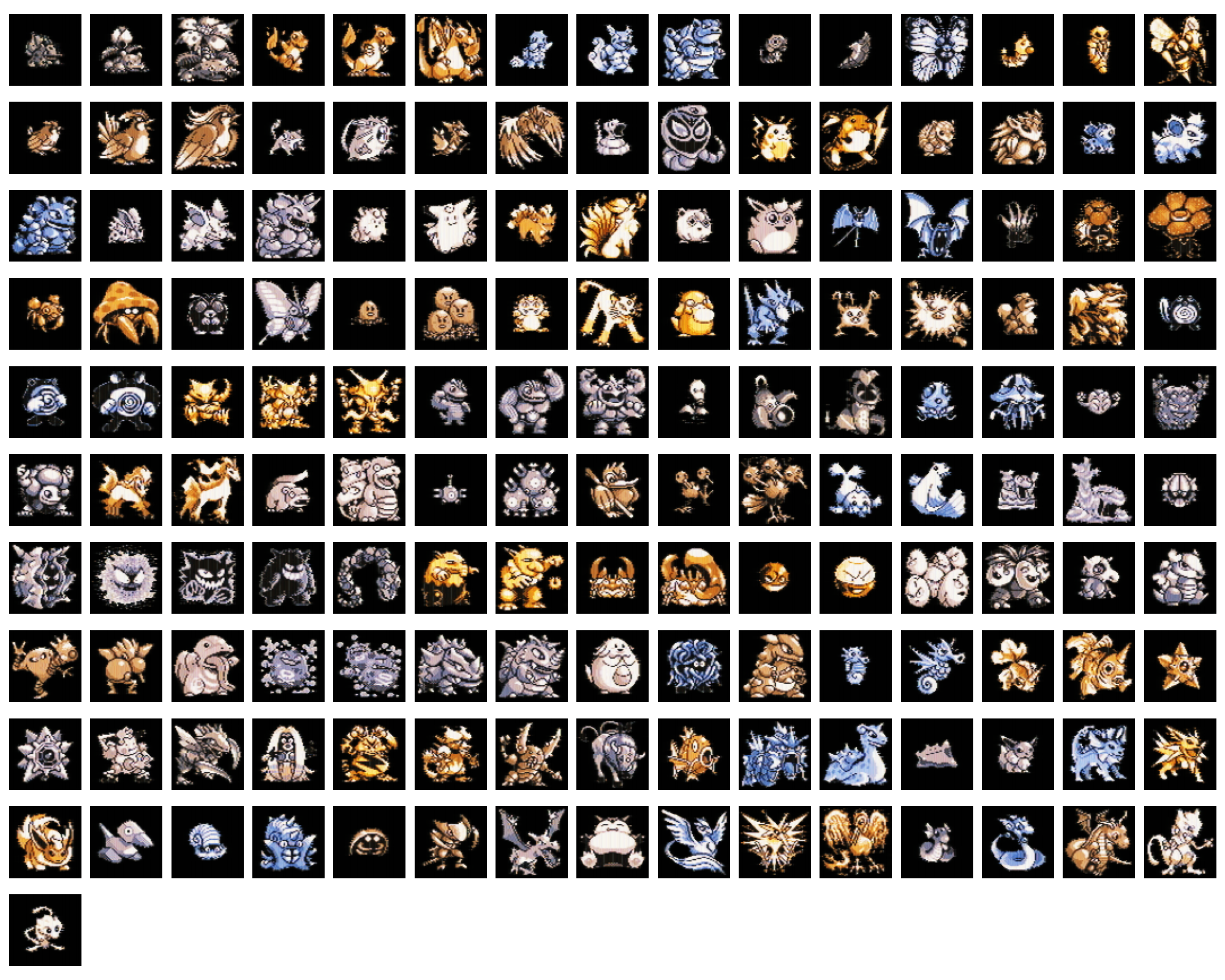
Pokémon Dataset Experiments
In addition to the grayscale image experiments, we also applied our autoencoder architectures to a dataset of 151 Pokémon sprites from the first generation games.
Reconstruction
Each model attempts to reconstruct the original Pokémon sprites. Below are the reconstruction results:
1D Layer
2D Layer
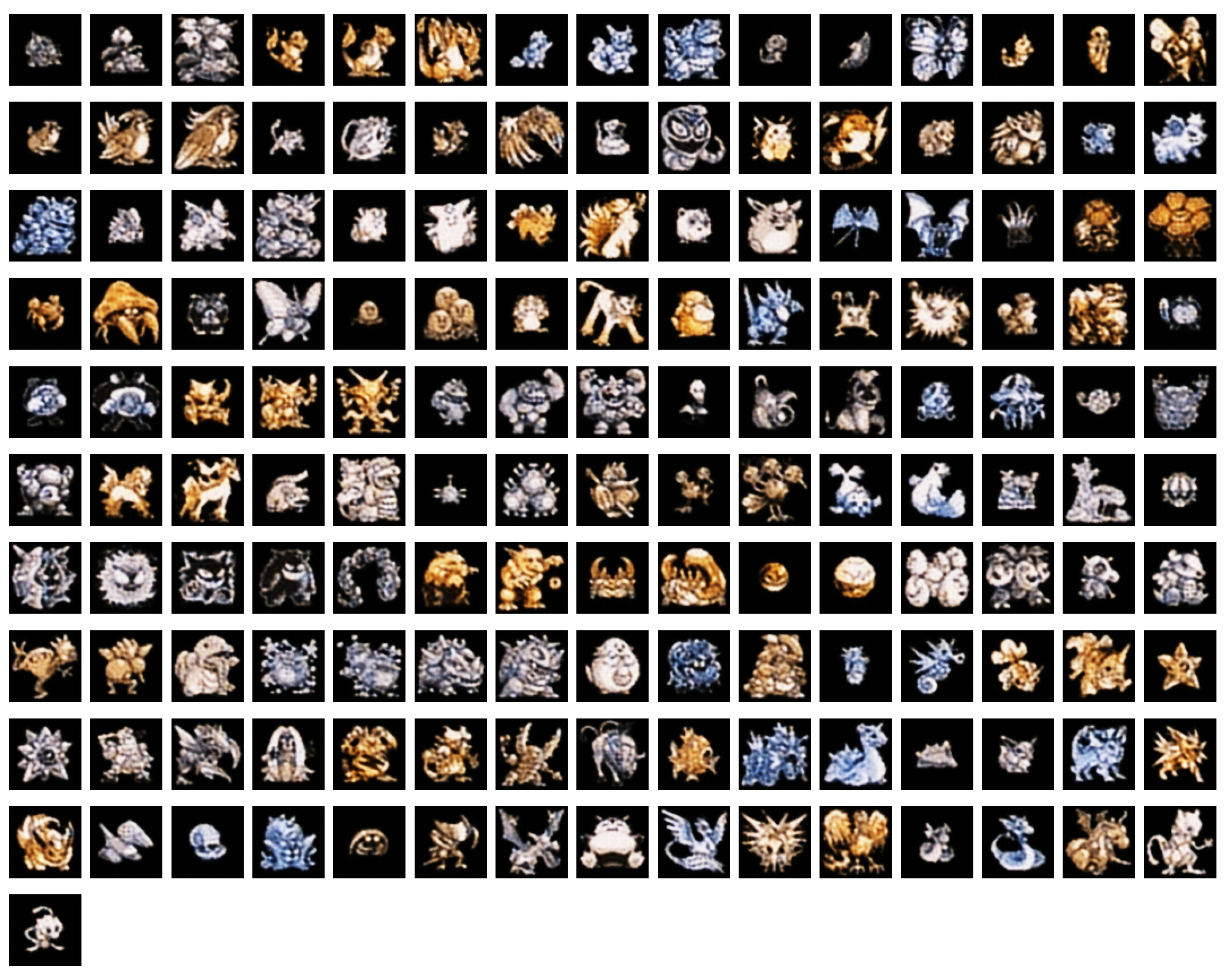
3D Layer
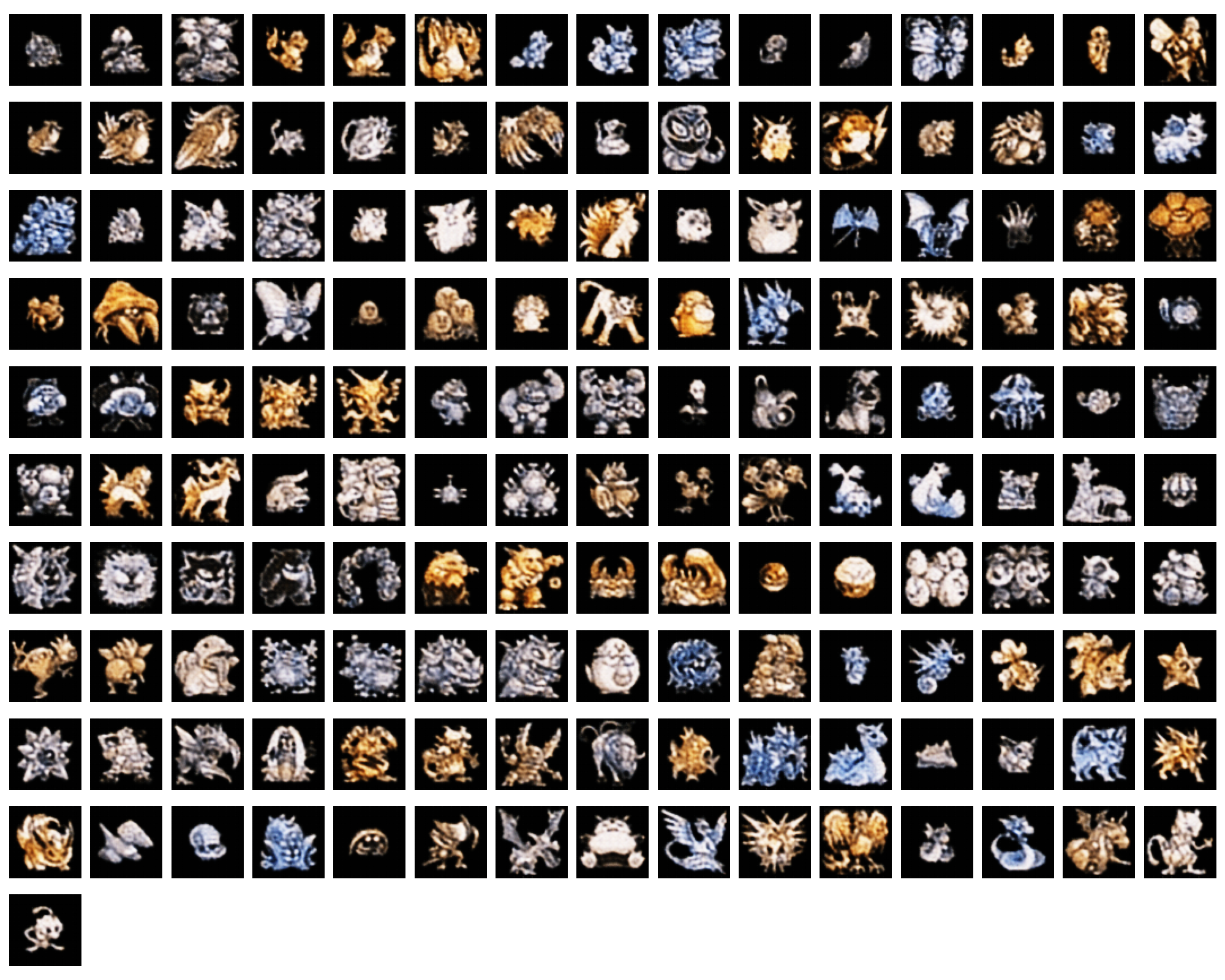
4D Layer
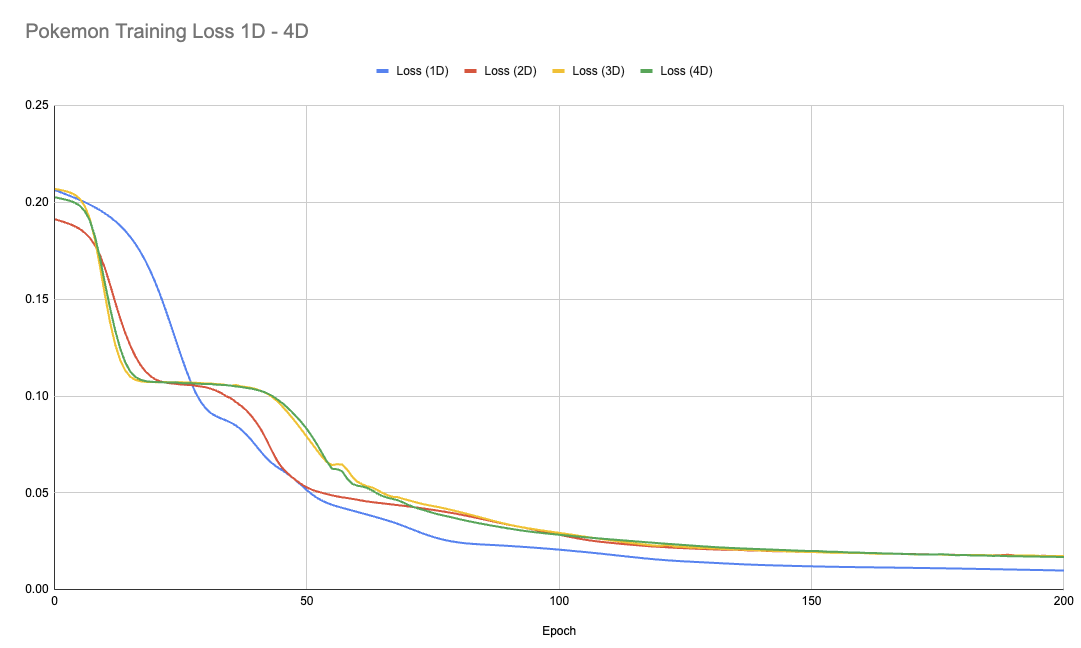
Combined Training Loss
The following graph shows the training loss curves for all Pokémon autoencoder models together:
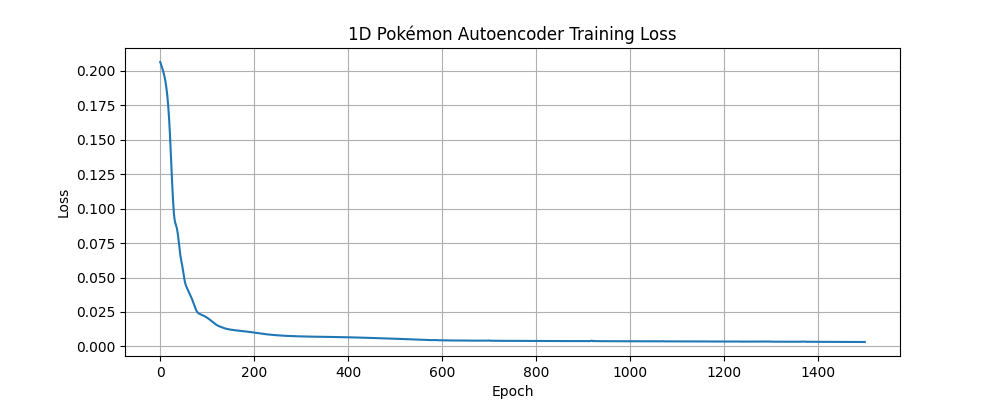
Training Loss
Below are the individual training loss curves for the Pokémon autoencoder models:
1D Layer
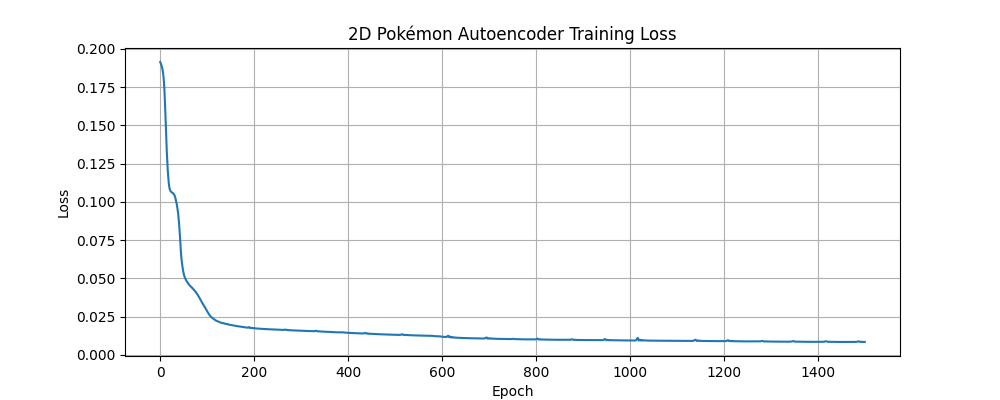
2D Layer
3D Layer
4D Layer
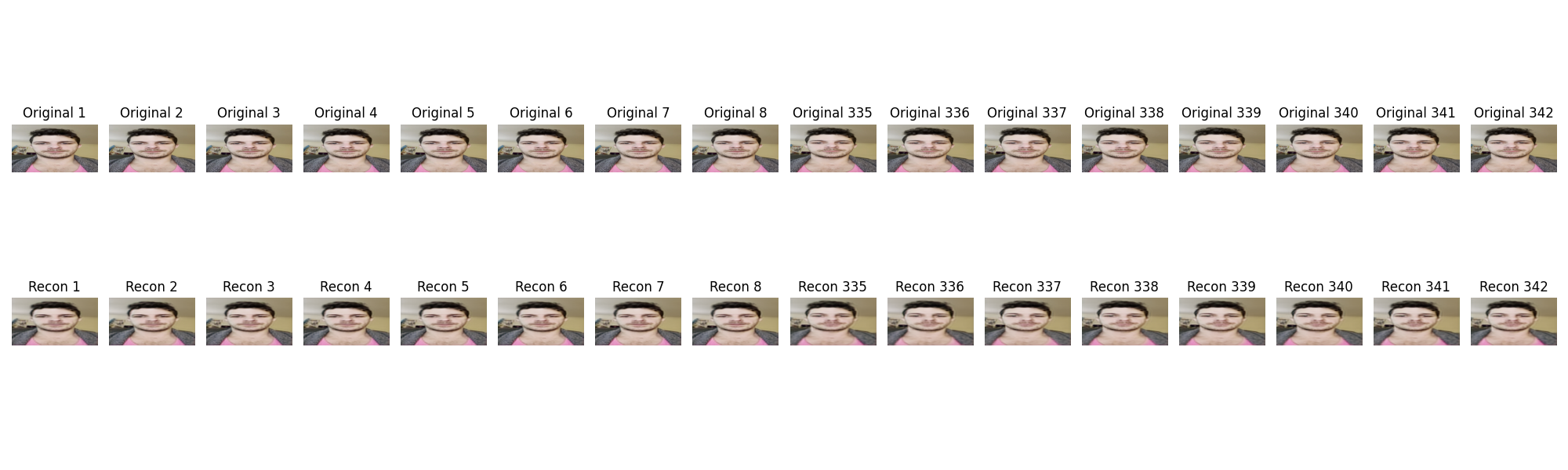
Video Experiments
We extended our autoencoder experiments to video data, exploring how 2D and 3D convolutional architectures handle video frames. Note most of the frames are similar so despite a larger number of frames (342) than Pokemon (151) the NN learns faster.
Reconstruction
2D Layer

3D Layer
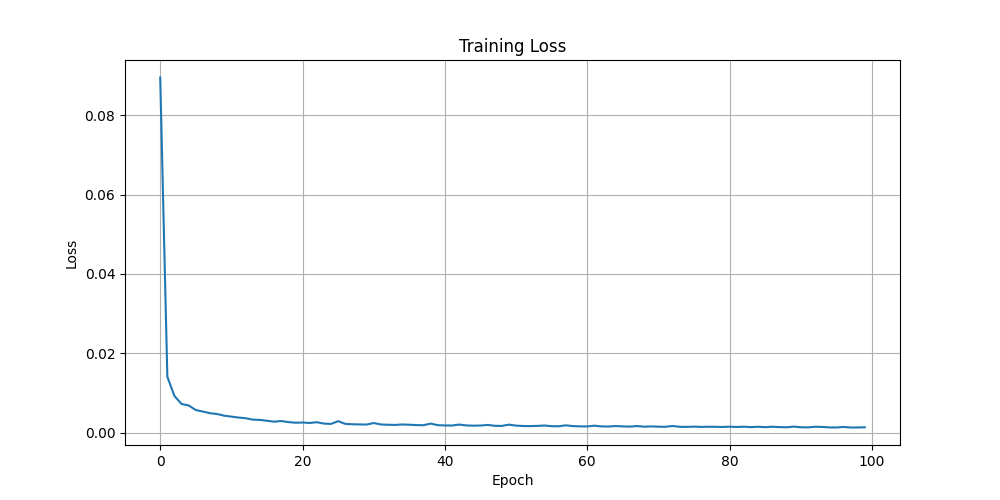
Training Loss
The training loss curves for the video autoencoder models:
2D Layer
3D Layer
Architectural Differences
The key difference between these approaches:
- 2D Video Autoencoder: Processes each frame independently using 2D convolutions, treating the video as a batch of separate images.
- 3D Video Autoencoder: Processes the entire video sequence as a 3D volume using 3D convolutions, allowing it to learn temporal patterns across frames.
 Arrived
Arrived
 Ninja Turdle
Ninja Turdle